
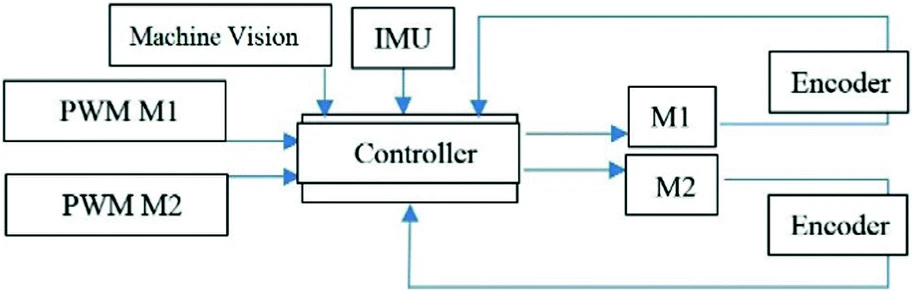
Agricultural Service Mobile Robot Modeling and Control Using Artificial Fuzzy Logic and Machine Vision
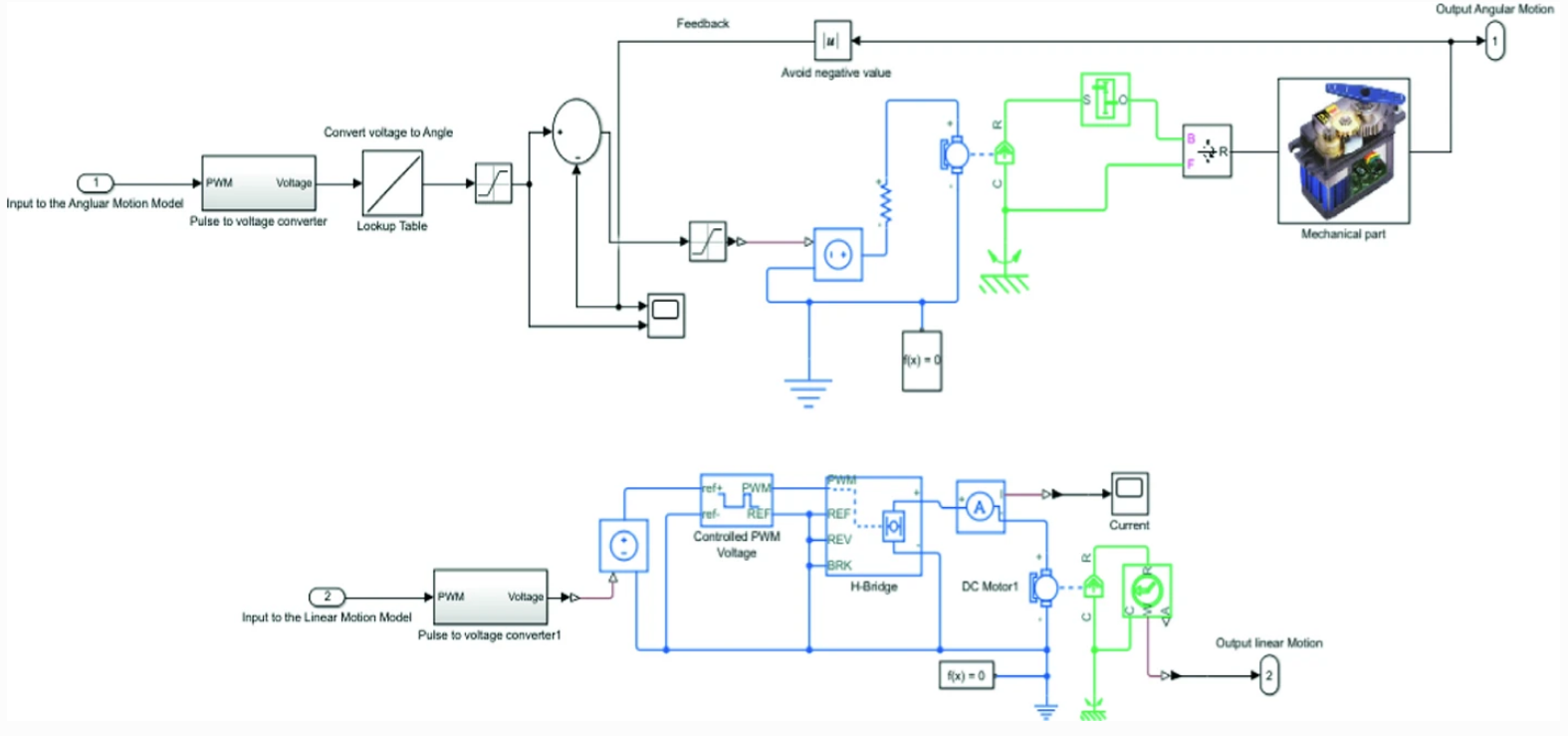
This paper represents modeling and control of an agricultural service skid steering mobile robot for the purposes of grass cutting using Proportional-Integral-Derivative (PID) controller and Fuzzy Logic techniques and feedback signals from sensors as IMU, encoders, and Machine Vision. The paper deals with the system modeling into two methods: The first is using Fuzzy modeling as a modeling tool for complex nonlinear system, the second is using MATLAB software system Identification Tool. The study Uses PID, Fuzzy logic controller and fuzzy self-tuning of PID controller to control the path

Fabrication of bio-plastic composite pellets from agricultural waste and food waste
This study aims to produce starch bioplastic pellets from food waste such as potato peels. Measuring the ease of flow of the melt is crucial for producing these pellets. The melt flow index (MFI) is measured in this study to evaluate the consistency of the produced pellets and determine the extent of degradation of the plastic because of molding. This study investigates the effect of adding different fillers to the starch matrix on reducing the MFI value. The fillers used in this work are nano chitosan, nano potato peel, and micro cellulose fillers. The fillers were used with different
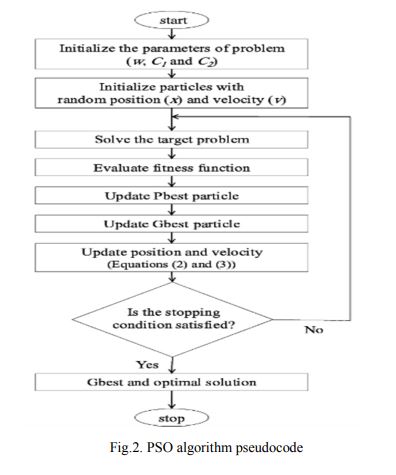
Implementation of PID Controller with PSO Tuning for Autonomous Vehicle
In the use of automatic control and its optimization methods, this research discusses how Proportional Integral Derivative (PID) controller is used to provide a smooth auto-parking for an electrical autonomous car. Different tuning methods are shown, discussed, and applied to the system looking forward to enhancing its performance. Time domain specifications are used as a criterion of comparison between tuning methods in order to select the best tuning method to the system with a proper cost function. Results show that Particle Swarm Optimization (PSO) method gives the best results according
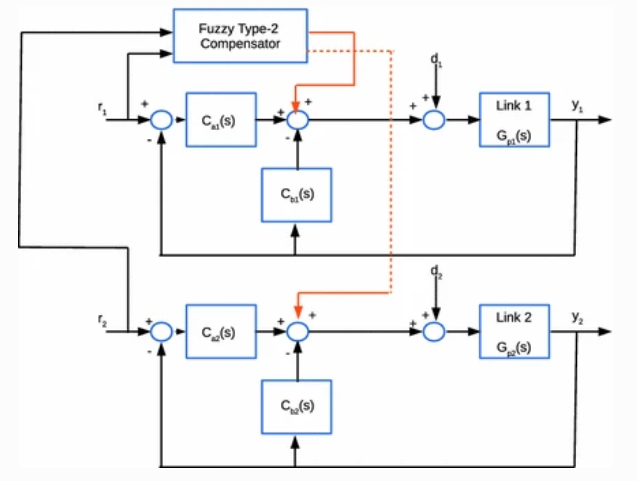
Fractional Order Two Degree of Freedom PID Controller for a Robotic Manipulator with a Fuzzy Type-2 Compensator
In this paper a novel strategy for the position control and trajectory tracking of robotic manipulators is proposed. This strategy consists of an independent two degree of freedom PID controller for a two links robotic arm. Due to the capability of two degree of freedom PID controllers to deal with disturbances, each link is controlled independently considering that the disturbance does not affect the system performance due to the robustness of the closed loop system. Then, a fuzzy type-2 centralized compensator is implemented to drive the orientation variables with the desired trajectory in
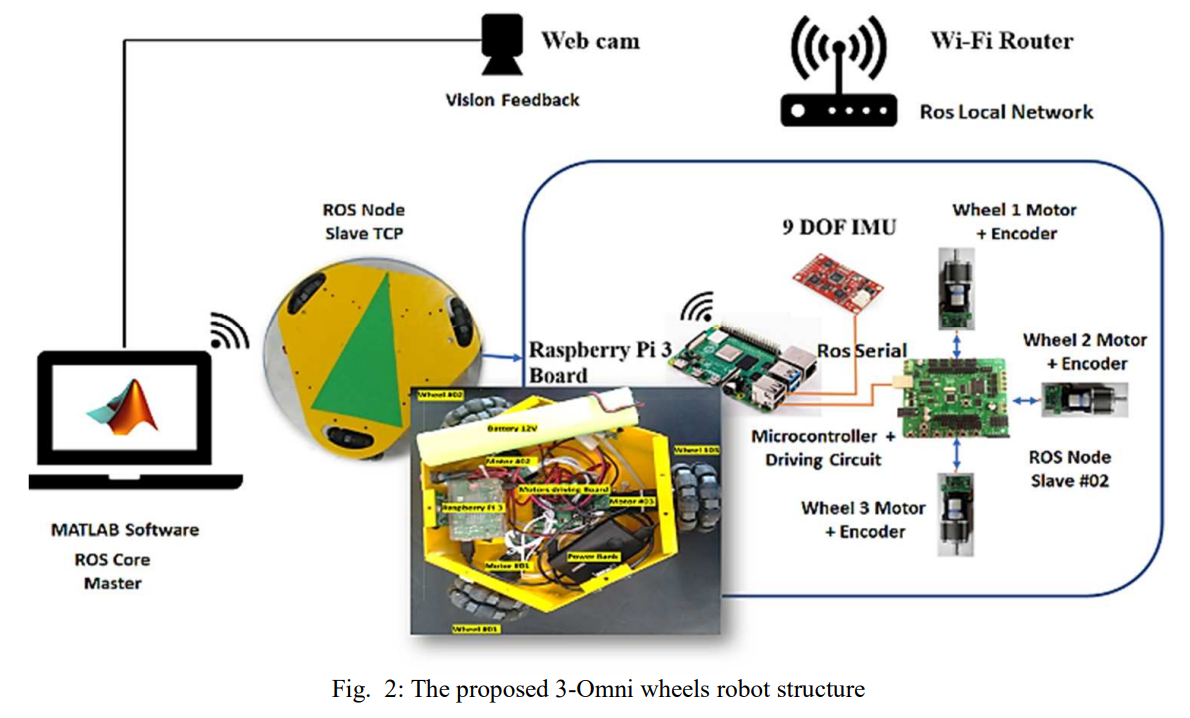
Gray Wolf Optimization of Fractional Order Control of 3-Omni Wheels Mobile Robot: Experimental Study
Committing robotics with artificial intelligence becomes mandatory collaboration with distinct environments. Omnidirectional Wheeled (Omni-WD) mobile robots are one of the robots that interact with humans in various circumstances, where it is important to function effectively and accurately. In this paper, the distinction of a 3WD-Omni model and control using machine vision is demonstrated. The use of fractional order (FO) calculus has been stated to increase the degrees of freedom of the controller over the integer ones. Hybridization of FO control and metaheuristics optimization is reported
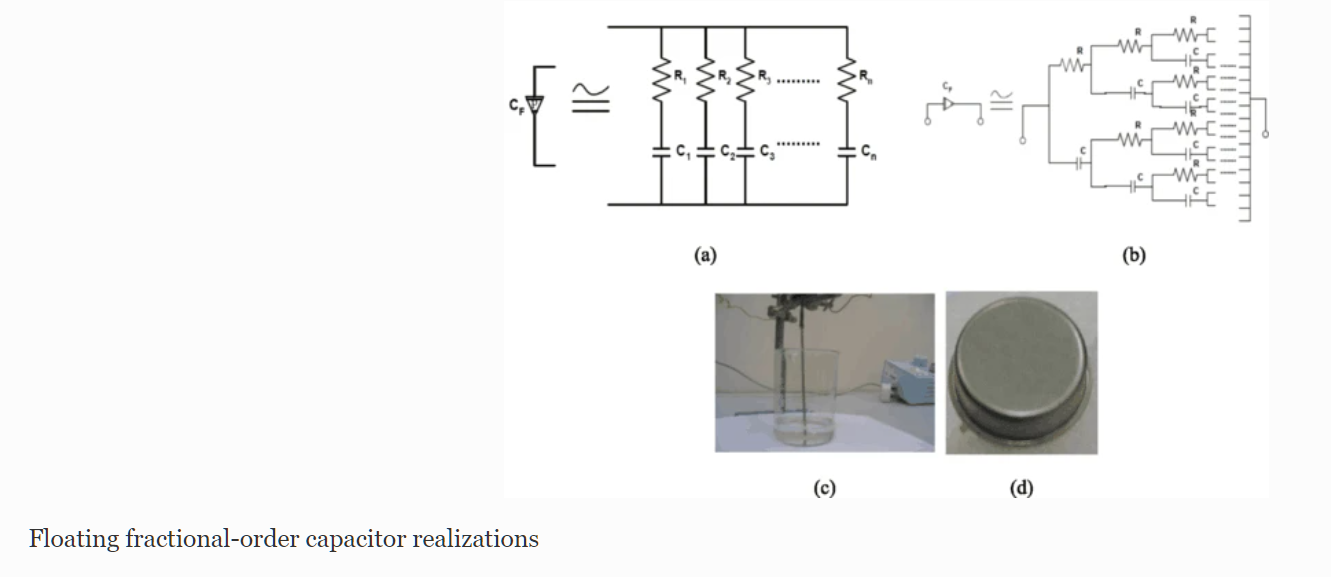
Optimization of fractional-order RLC filters
This paper introduces some generalized fundamentals for fractional-order RL β C α circuits as well as a gradient-based optimization technique in the frequency domain. One of the main advantages of the fractional-order design is that it increases the flexibility and degrees of freedom by means of the fractional parameters, which provide new fundamentals and can be used for better interpretation or best fit matching with experimental results. An analysis of the real and imaginary components, the magnitude and phase responses, and the sensitivity must be performed to obtain an optimal design
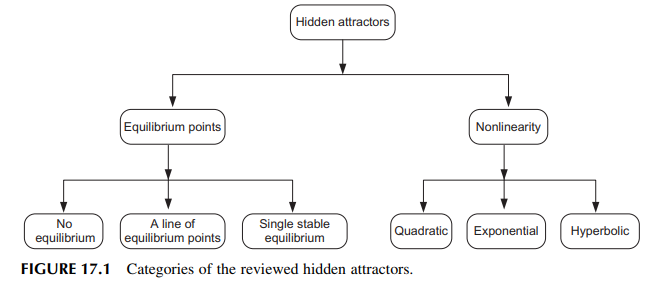
Chaotic properties of various types of hidden attractors in integer and fractional order domains
Nonlinear dynamical systems with chaotic attractors have many engineering applications such as dynamical models or pseudo-random number generators. Discovering systems with hidden attractors has recently received considerable attention because they can lead to unexpected responses to perturbations. In this chapter, several recent examples of hidden attractors, which are classified into several categories from two different viewpoints, are reviewed. From the viewpoint of the equilibrium type, they are classified into systems with no equilibria, with a line of equilibrium points, and with one
Controller Design and Optimization of Magnetic Levitation System (MAGLEV) using Particle Swarm optimization technique and Linear Quadratic Regulator (LQR)
Magnetic Levitation System is one of practical examples which faces some nonlinearities behavior. Such systems require special types of controller parameters consideration for accurate results. In this paper, the process of tuning is to determine the system poles and getting them away from the instability region using state feedback (SF) controller methodology. The resulted controllable system parameters are estimated using LQR controller. Since the desired goal is to minimize vital parameters in the system behavior like the steady state error, settling time, raising time of the system and
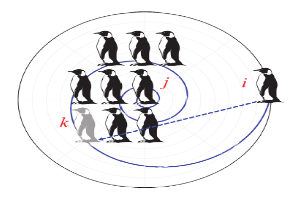
Discretization of emperor penguins colony algorithms with application to modular product design
Modularity concepts attracted the attention of many researchers as it plays an important role in product design problems. Modularity requires dividing a product into a set of modules that are independent between each other and dependent within. The product is represented using Design Structure Matrix (DSM). DSM works as a system representation tool; it visualizes the interrelationship between product elements. In this research, a comparison is conducted between four optimization algorithms: Emperor Penguins Colony (EPC), First Modified Emperor Penguins Colony (MEPC1), Second Modified Emperor
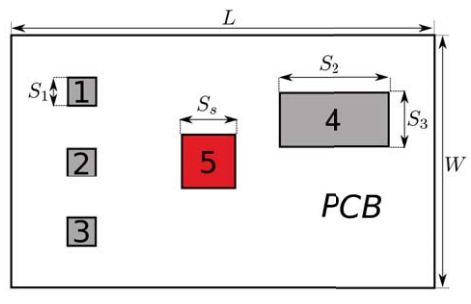
The effect of the geometric and thermal parameters on the thermal stresses during the passive cooling of printed circuit boards
The effect of components' thermal properties in addition to their geometric configuration on the developed thermal stress in a model printed circuit board (PCB) is investigated. This effect is quantified through three parameters, the average normalized temperature gradient, maximum normalized temperature gradient and the uniformity factor. It is found that the effect of the geometric configuration, especially that of the heat-generating component, is more significant than the thermal properties of the components. © 2019 IEEE.