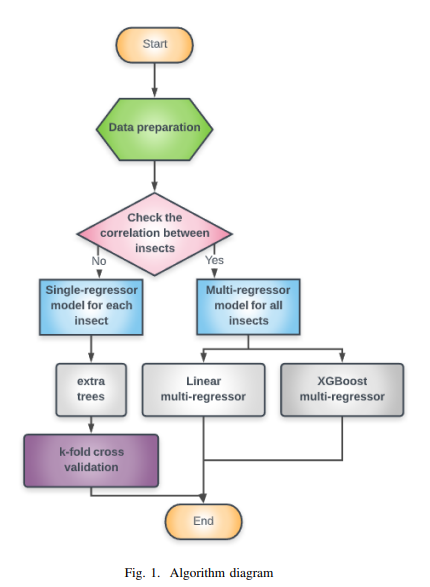
The increase in population, food demand, and the pollution levels of the environment are considered major problems of this era. For these reasons, the traditional ways of farming are no longer suitable for early and accurate detection of biotic stress. Recently, precision agriculture has been extensively used as a potential solution for the aforementioned problems using high resolution optical sensors and data analysis methods that are able to cope with the resolution, size and complexity of the signals from these sensors. In this paper, several methods of machine learning have been utilized